| 首页 | 工程简介 | 相关政策 | 工作要闻 | 工程成果 | 数据发布 | 国际视野 | 科普知识 | 探月群英 | 视频集锦 | 访谈直播 | 宇宙人文 |
|
| 主办单位:国家航天局探月与航天工程中心 承办单位:国家航天局新闻宣传中心 协办单位:嫦娥奔月航天科技(北京)有限责任公司 中国科学院国家天文台 地址:北京市海淀区阜成路甲8号 邮编:100048 京ICP备19018762号 信息报送:clep@cnsa.gov.cn |
 中国探月工程微信公众号 |
| 首页 | 工程简介 | 相关政策 | 工作要闻 | 工程成果 | 数据发布 | 国际视野 | 科普知识 | 探月群英 | 视频集锦 | 访谈直播 | 宇宙人文 |
|
| 主办单位:国家航天局探月与航天工程中心 承办单位:国家航天局新闻宣传中心 协办单位:嫦娥奔月航天科技(北京)有限责任公司 中国科学院国家天文台 地址:北京市海淀区阜成路甲8号 邮编:100048 京ICP备19018762号 信息报送:clep@cnsa.gov.cn |
中国探月工程微信公众号 |



2020年12月3日23时10分,嫦娥五号上升器携带月球样品从月面点火起飞,约6分钟后,进入环月椭圆轨道。12月6日2时13分,上升器准确到达轨返组合体前方50公里、上方约10公里的预定“交班”位置。5时42分,上升器与轨返对合体完成交会对接,6时,样品封装容器从上升器转移到返回器中。这个自主交会对接和样品转移过程就好像百米接力赛中的交接棒过程,精彩纷呈,技术含量极高。
采用从月面起飞后进行一次月球轨道交会对接,而不是从月面起飞后直接月地转移,这样的设计有利于采集和携带更多样品返回地球,并为后续任务进行技术积累和验证。
看点1——太空中的追逐上升器和轨返组合体都在环月飞行,但轨道高度不同,上升器在210公里高的外道跑,轨返组合体在200公里高的内道跑。内道路程短,轨返组合体跑得稍快一些,外道的上升器则跑得要慢一点。为了实现“交接棒”,轨返组合体需要在高度方向上抬高轨道,并且在前后方向上逐渐逼近上升器。当接近到一定距离时,轨返组合体会自主控制发动机来改变行进方向,抄近道赶上上升器。整个追逐过程设置多个停泊点,轨返组合体停下来保持相对位置不变,进行状态检查,并确保对接的时候测控条件满足要求。
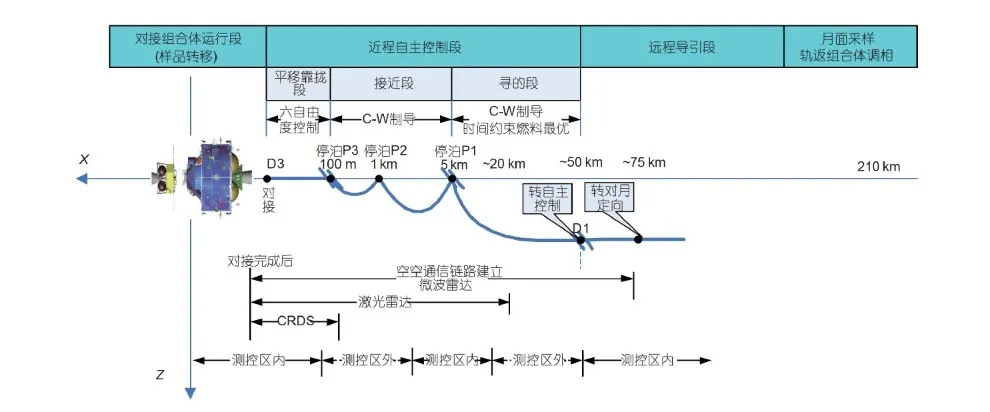
图:月球轨道交会对接飞行阶段划分。(来源:徐阳, 马琳, 刘涛, 等嫦娥五号月球轨道交会对接制导、导航与控制系统. 中国科学: 技术科学, 2021, 51: 788–798)
看点2——“高精测量”+“知己知彼”在交会对接过程中,需要让轨返组合体和上升器清楚彼此的相对位置、速度和姿态,为此配置了多种进行相对测量的敏感器,用来实现相对导航。在相距100公里的时候,微波雷达开始工作,既按照传统雷达的“点名答到”模式提供两器的相对运动参数,还升级到“对话交流”模式,在轨返组合体和上升器之间双向传输遥控指令和遥测参数。在相距20公里的时候,激光雷达“登场”,提供更高精度的测量信息。而到了100米左右,光学敏感器开始大显身手,实现近距离的距离和姿态测量。这些敏感器在作用距离上彼此接力又有覆盖衔接,从而确保在任意距离上至少有两种不同体制的敏感器可用,使得轨返组合体看得更准,测得更精,系统更加可靠。
看点3——38万公里之外的精准“交接棒”轨返组合体重达2吨多,上升器质量却只有它的六分之一,如果采用传统的碰撞式对接,极易导致上升器被撞飞。为此,专门设计了抱爪式抓捕对接机构,每对抱爪犹如两只手臂,在1秒内快速合拢形成闭合空间,将位于上升器的被动锁柄牢牢地约束在内部,再也无法逃脱。对得上还得对得准,对接后的精度要求优于0.5毫米,好比在太空“穿针引线”。采用3套抱爪机构星型周向布局、自定心设计,实现了两飞行器对接后的自动对准中心,在保证高精度对接的同时实现了轻量化设计。转移机构的设计也很巧妙。为了实现六百多毫米的长行程样品容器转移,设计师们从尺蠖的身上找到了灵感,基于运动行程放大+接力转移的原理,提出了一种仿尺蠖大展收接力式机构,通过多级并联连杆的简单循环展收运动,就可以实现物体的连续移动。整个转移过程如同毛毛虫的运动,一伸一缩、不断前进。

中国探月工程微信公众号
主办单位:国家航天局探月与航天工程中心
承办单位:国家航天局新闻宣传中心
协办单位:嫦娥奔月航天科技(北京)有限责任公司
中国科学院国家天文台
地址:北京市海淀区阜成路甲8号
邮编:100048
京ICP备19018762号
信息报送:clep@cnsa.gov.cn